armor.wikisort.org - Танк
Quadruped Transporter или Walking Truck (/ˈkwɑːdroʊpɛd/, букв. «четвероногое», произносится «Квадропе́д»,[1] в пер. с англ. «четвероногий транспортёр» или «ходячий грузовик»; также использовалось наименование Cybernetic Anthropomorphous Machine, CAM — «кибернетическая антропоморфная машина») — экспериментальная роботизированная транспортно-грузовая машина военного назначения на шагающей подвижной платформе, разработанная американским инженером-робототехником Ральфом Мошером и изготовленная компанией General Electric (работником которой и являлся конструктор машины) в интересах Министерства обороны США для сопровождения мотопехотных подразделений в сложнопересечённой местности, транспортировки военного имущества и других грузов. Научно-исследовательские и опытно-конструкторские работы по проекту велись с 1962 по 1970 гг. Проект финансировался совместно Агентством по перспективным научно-исследовательским разработкам США и Автобронетанковым управлением Армии США[2]. «Квадропед» был первой шагающей машиной военного назначения, воплощённой в металле, породившей целый ряд проектов в подражание ей или что-либо позаимствовавших из его компоновочной схемы[3]. Сам по себе положительный опыт создания и опытной эксплуатации машины показал принципиальную возможность создания шагающих машин различного назначения на существовавшей тогда производственной базе[4].
| General Electric Quadruped Transporter | |
|---|---|
| Прототип машины в Военно-транспортном музее Армии США, Форт-Юстис, штат Вирджиния | |
| Quadruped Transporter | |
| Классификация | транспортёр повышенной проходимости |
| Боевая масса, т |
1,360 (без нагрузки) 1,632 (при полной нагрузке) |
| Компоновочная схема | шагающая |
| Экипаж, чел. | 1 (оператор) |
| История | |
| Разработчик | Ральф Мошер |
| Производитель |
|
| Годы разработки | 29 июня 1962—25 апреля 1963 |
| Годы производства | 1 мая 1967—15 мая 1968 |
| Годы эксплуатации | 27 мая 1968—1 мая 1970 |
| Количество выпущенных, шт. | 1 (опытный прототип) |
| Основные операторы |
|
| Размеры | |
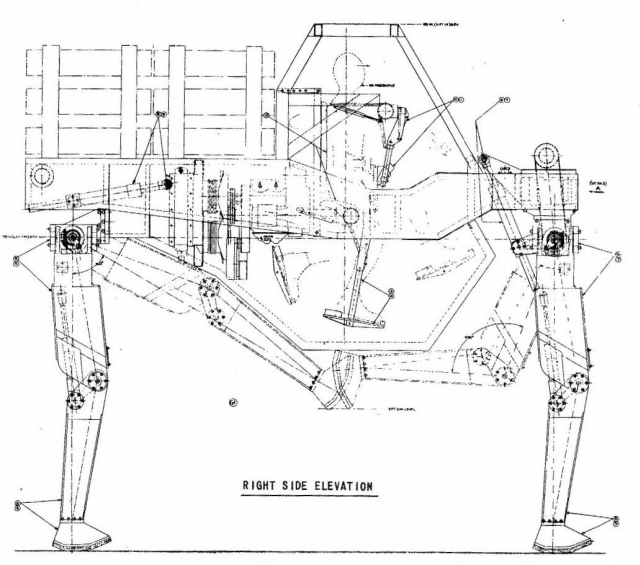
| Длина корпуса, мм | 3530,6 |
| Ширина, мм | 1066,8 |
| Высота, мм |
4572 (общая); 2743,2 (длина конечности) |
| Клиренс, мм | 0—1219,2 |
| Подвижность | |
| Тип двигателя | бензиновый |
| Мощность двигателя, л. с. | 90 |
| Удельная мощность, л. с./т | 66 |
| Тип подвески | механико-гидравлическая сервоприводная |
| Преодолеваемая стенка, м | 1,524 |
Ход работ
Аванпроект машины был представлен в марте 1962 г., после чего проект прошёл три этапа. Первый этап (№ государственного контракта: DA-19-020-ORD-5729): Государственный заказ на проведение НИОКР по тематике создания шагающей машины был получен 29 июня 1962 г., готовый проект был подготовлен и представлен к апрелю 1963 г. Второй этап (№ ГК: DA-36-034-AMC-0268T): Государственный заказ на изготовление опытного образца был получен в 1965 г., с 8 апреля 1965 г. по 28 февраля 1966 г. проводились заводские испытания машины. К 15 мая 1968 г. закончилась сборка опытного прототипа и предварительные испытания всех его компонентов. 26 апреля 1968 г. в ходе контрольных испытаний машина успешно легла днищем на пол. «Квадропед» был продемонстрирован широкой публике в апреле 1969 г. Третий этап (№ ГК: DA-20-113-AMC-09225(T): Государственный заказ на испытания ходовых качеств опытного прототипа, проводившиеся с февраля по август 1970 г. В связи с относительно высоким расположением кабины оператора и неустойчивостью машины в движении, многие операторы-испытатели новых образцов техники отказывались от участия в испытаниях. В августе 1970 г. опытный прототип машины был доставлен в Автобронетанковое управление Армии США в г. Уоррен, штат Мичиган. По соображениям финансового характера программа исследований и опытно-конструкторских работ была закрыта[5].
Предназначение
«Квадропед» предназначался для транспортировки различного военного имущества: оружия и боеприпасов в условиях сложнопересечённой и труднодоступной местности, например, в горах, заболоченной местности, при форсировании неглубоких водных преград (рек с медленным течением или водоёмов со стоячей водой) с крутыми берегами, а также в других условиях местности[2]. Кроме того, в ходе заводских испытаний опытным путём было подтверждено, что высота и грузоподъёмность машины позволяли ей выполнять функции подноса и подвески авиационных бомб на узлах крепления, расположенных на внешней подвеске и на узлах крепления бомбодержателей в бомбовом отсеке самолёта[5].
Техническое описание
- Управление
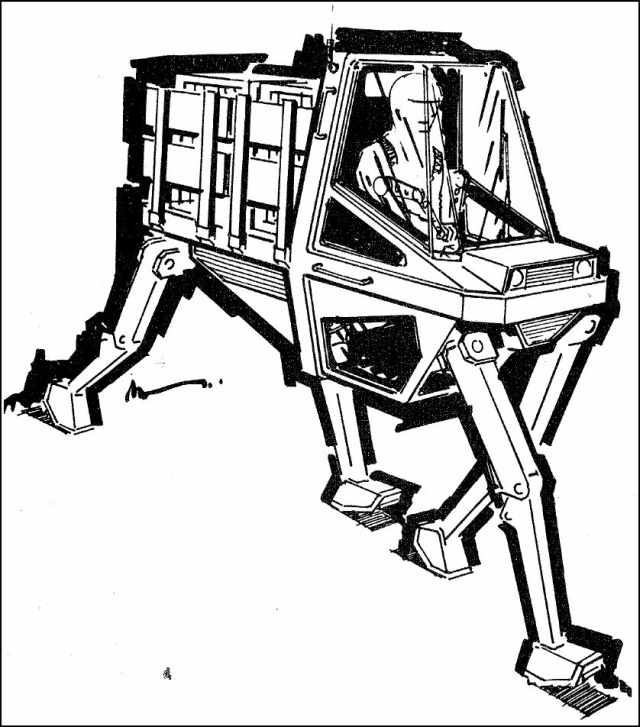
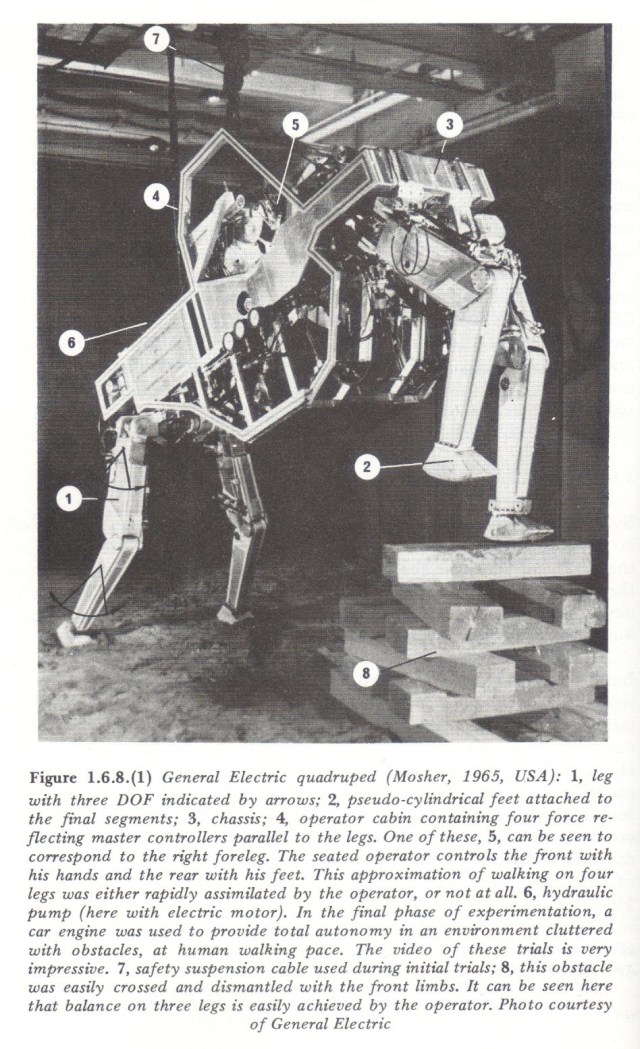
Панель управления машиной включала два рычага ручного управления — левый и правый — которые контролировали движение передних конечностей машины, и два привода ножного управления — которые контролировали движение задних конечностей машины. Непривычность позы и движений оператора в кабине, в сочетании с постоянной вибрацией и сменой положения в пространстве, приводили к повышенным нагрузкам на вестибулярный аппарат оператора и его быстрой утомляемости, что вело к необходимости перерыва в работе уже через пятнадцать минут после начала эксплуатации[3].
- Ходовые качества
Грузоподъёмность машины составляла 272 кг. Столько же машина могла поднимать каждой конечностью по отдельности. Масса толкаемых или буксируемых волоком, или отодвигаемых с дороги предметов могла составлять 545 кг[6]. Коэффициент дублирования сил от оператора к машине составлял 1:120. Скорость циркуляции машинного масла в системе гидравлики машины составляла около 190 литров в минуту при давлении 163 ат[3] (предельное давление в системе составляло 220 ат).[5] Каждая конечность была трёхтактного хода (2 × на узле крепления, 1 × на сгибателе). Усилие, развиваемое каждой конечностью в любом направлении составляло до 6672 Н или 680 кгс[6]. Развиваемая мощность позволяла «Квадропеду» вытолкать из канавы застрявший в грязи армейский внедорожник M151 MUTT[5].
Прототип
После прекращения финансирования проекта, опытный прототип «Квадропеда» находился на складском хранении на базе хранения военной техники Армии США «Детройтский арсенал» в г. Уоррен, штат Мичиган, после чего был передан в качестве музейного экспоната в Военно-транспортный музей Армии США на военной базе Форт-Юстис, штат Вирджиния, где находится по настоящее время.
См. также
- BigDog
- Hardiman
- Pedipulator
- Quattroped
- Железный Доббин
Примечания
- В американском варианте произношения ударение делается на первый слог: «Ква́дропед».
- Mosher, Ralph S. Exploring the Potential of a Quadruped (англ.). // SAE Transactions. — N.Y.: Society of Automotive Engineers, 1970. — Vol.78 — No.3 — P.836–843.
- Rosheim, Mark E. Архивная копия от 29 августа 2016 на Wayback Machine Robot Evolution: The Development of Anthrobotics (англ.) Архивная копия от 29 августа 2016 на Wayback Machine. — N.Y.: John Wiley & Sons, 1994. — P.240–244 — 423 p. — (Wiley-Interscience Publication) — ISBN 0-471-02622-0.
- Vukobratović, Miomir. Legged Locomotion Robots and Anthropomorphic Mechanisms (англ.). — Belgrade: Mihailo Pupin Institute, 1975. — P.334–335 — 500 p.
- Mosher, Ralph S. Архивная копия от 26 августа 2016 на Wayback Machine Applying Force Feedback Servomechanism Technology to Mobility Problems (англ.) Архивная копия от 26 августа 2016 на Wayback Machine. — Elnora, New York: Robotics, Inc., August 1973. — P.90–105 — 204 p.
- Архивная копия от 29 августа 2016 на Wayback Machine The Fabulous Walking Truck (англ.) Архивная копия от 29 августа 2016 на Wayback Machine. // Popular Science : Monthly. — N.Y.: Popular Science Publishing Co., March 1969. — Vol.194 — No.3 — P.76–79.
| Второй Мировой Войны → | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 |
|  | |||||||||||||||
| |||||||||||||||||
| |||||||||||||||||
| |||||||||||||||||
| |||||||||||||||||
| |||||||||||||||||
* — производились только на экспорт; ** — проекты танков с ядерной силовой установкой; курсивом выделены опытные и не пошедшие в серийное производство образцы | |||||||||||||||||





{kind=link}
{kind=link}
{kind=link}
.jpg){kind=link}
Другой контент может иметь иную лицензию. Перед использованием материалов сайта WikiSort.org внимательно изучите правила лицензирования конкретных элементов наполнения сайта.
WikiSort.org - проект по пересортировке и дополнению контента Википедии